哨兵系列卫星
哨兵系列卫星
# 简介
哨兵系列卫星是哥白尼计划的一部分,该计划是欧盟的一个地球观测计划。要了解哨兵卫星,我们需要先了解哥白尼计划。
# 哥白尼计划
几十年来,欧洲各国在地球观测领域做了大量研发工作,但具有重复性与缺乏服务连续性。1998 年,欧洲成立了全球环境安全监测GMES用于统筹各国的地球观测系统。2012 年 ,在欧盟直接参与融资和发展后,该系统后来更名为哥白尼。关于哥白尼计划的具体情况,请看该视频:
哥白尼计划由三部分组成:
空间部分(哨兵系列太空任务与其他太空机构任务);
测量部分(提供海洋、大陆表面和大气信息的陆基和机载数据收集网络);
数据管理与全球共享部分;
# 哨兵卫星年表
| 卫星名 | 发射时间(年月日) | 终止时间 | 卫星定位 |
|---|---|---|---|
| Sentinel-1A | 2014.4.3 | 在运行,预期寿命7年 | 雷达 |
| Sentinel-1B | 2016.4.25 | 在运行,预期寿命7年 | 雷达 |
| Sentinel-2A | 2015.6.23 | 在运行,预期寿命7年 | 高分辨率光学 |
| Sentinel-2B | 2017.3.7 | 在运行,预期寿命7年 | 高分辨率光学 |
| Sentinel-3A | 2016.2.16 | 在运行,预期寿命7年 | 包含雷达、光学成像光谱仪、定位等7类传感器 |
| Sentinel-3B | 2018.4.25 | 在运行,预期寿命7年 | 包含雷达、光学成像光谱仪、定位等7类传感器 |
| Sentinel-4 | 预计2023年发射 | 预期寿命8.5年 | 气象 |
| Sentinel-5P | 2017.10.13 | 在运行,预期寿命7年 | 大气污染观测 |
| Sentinel-5 | 预计2021-2022年发射 | 预期寿命7.5年 | 大气监测 |
| Sentinel-6A | 2020.11.21 | 在运行,预期寿命5.5年 | 全球海洋地形观测 |
| Sentinel-6B | 预计2025年12月发射 | 预期寿命5.5年 | 全球海洋地形观测 |
| Sentinel-7 | 暂无时间安排 | 暂无 | 人为二氧化碳排放监测 |
| Sentinel-8 | 暂无时间安排 | 暂无 | 高时空地表温度监测 |
| Sentinel-9 | 暂无时间安排 | 暂无 | 极地冰雪地形高度计 |
| Sentinel-10 | 暂无时间安排 | 暂无 | 环境高光谱成像 |
| Sentinel-11 | 暂无时间安排 | 暂无 | 极地成像微波辐射计 |
| Sentinel-12 | 暂无时间安排 | 暂无 | 欧洲雷达观测系统-L波段SAR |
# 哨兵一号
# 简介
Sentinel-1 任务包括由两颗极轨卫星Sentinel-1A与Sentinel-1B组成星座,昼夜运行,执行 C 波段合成孔径雷达成像。可供用户使用的 Level-0、Level-1 和 Level-2 数据产品。

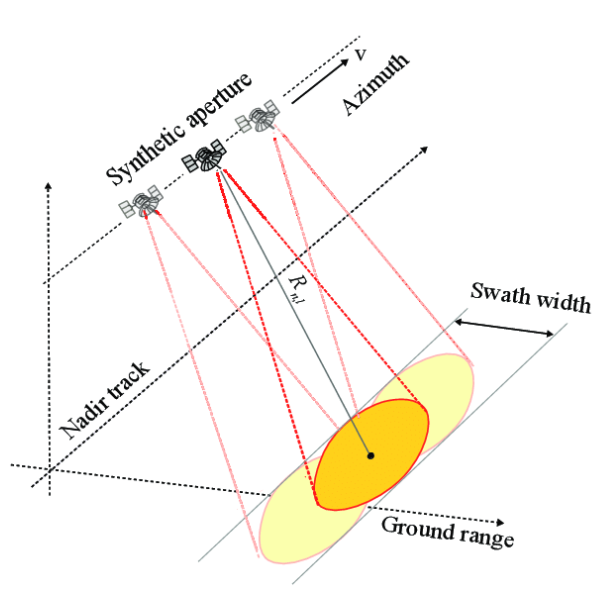
# 传感器
SENTINEL-1 携带一台 C-SAR传感器,工作在 5.405 GHz 的中心频率。它包括一个右视有源相控阵天线,支持快速的仰角和方位角扫描。C-SAR传感器在双极化(HH + HV,VV + VH)通过一个发射链(可切换到H或V)和两个平行的支撑件来实现操作接收对H和V偏振链。双极化数据可用于土地覆盖分类和海冰应用。
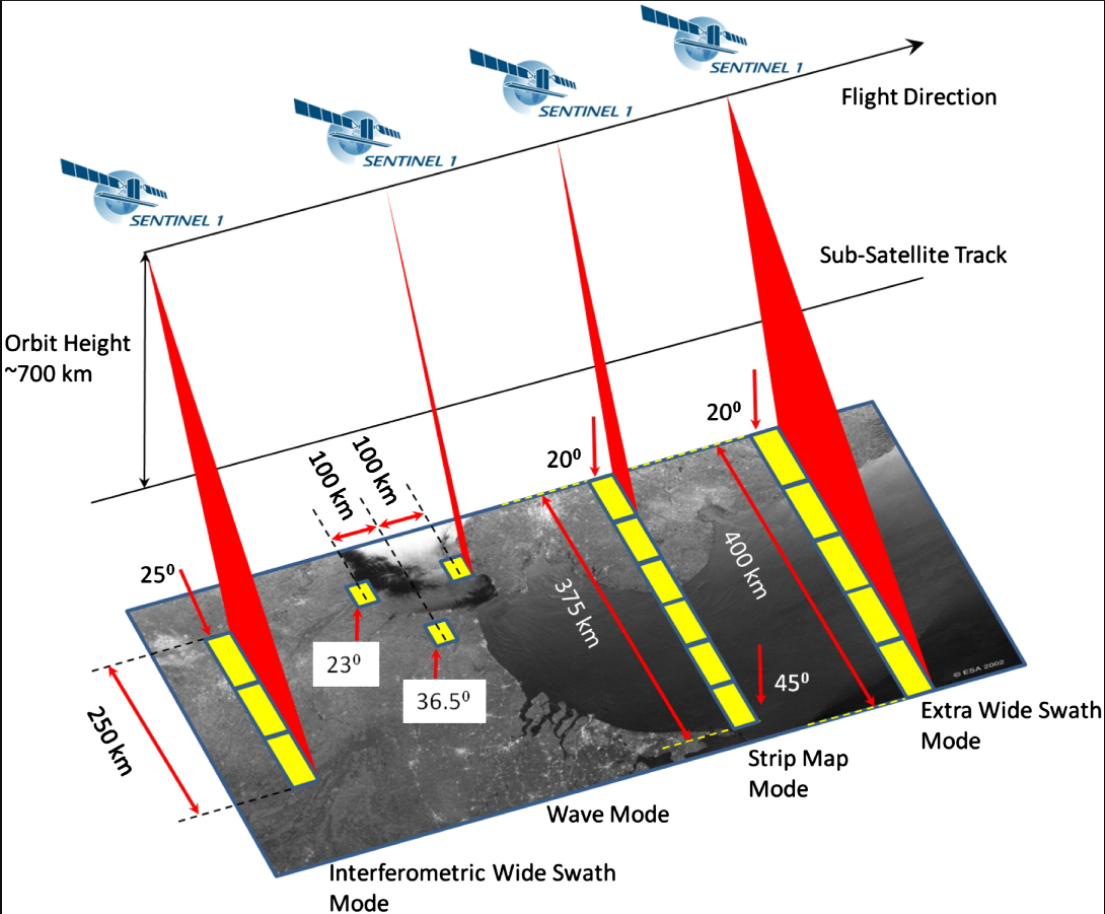
Sentinel-1拥有四种采集模式:
- 带状图 (Stripmap,SM)
- 干涉宽幅 (Interferometric Wide swath,IW)
- 超宽幅 (Extra-Wide swath,EW)
- 波浪模式 (Wave mode,WV)。
# 带状图(SM)模式:
该模式窄幅宽度为80 公里,提供 5 m x 5 m 分辨率影像。Sentinel-1通过改变光束入射角和仰角光束宽度,用户可以选择六个成像条带之一。
# 干涉宽幅(IW)模式:
该模式是Sentinel-1在陆地上的默认采集模式,窄幅宽度为250 公里,提供 5 m x 20 m 分辨率影像。
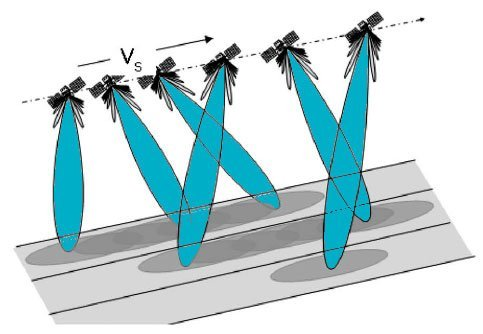
Sentinel-1在该模式下,使用 TOPSAR 技术。除了像 SCANSAR 在范围内控制波束外,还可以在每个脉冲串的方位方向上从后到前电子控制波束,避免扇形并产生更高质量的图像。多普勒频谱(在方位域中)和波数频谱(在仰角域中)的充分重叠确保了干涉测量。
# 超宽幅(EW)模式:
该模式主要用于海上和极地区域运营服务,满足覆盖面广,短重访时间要求。
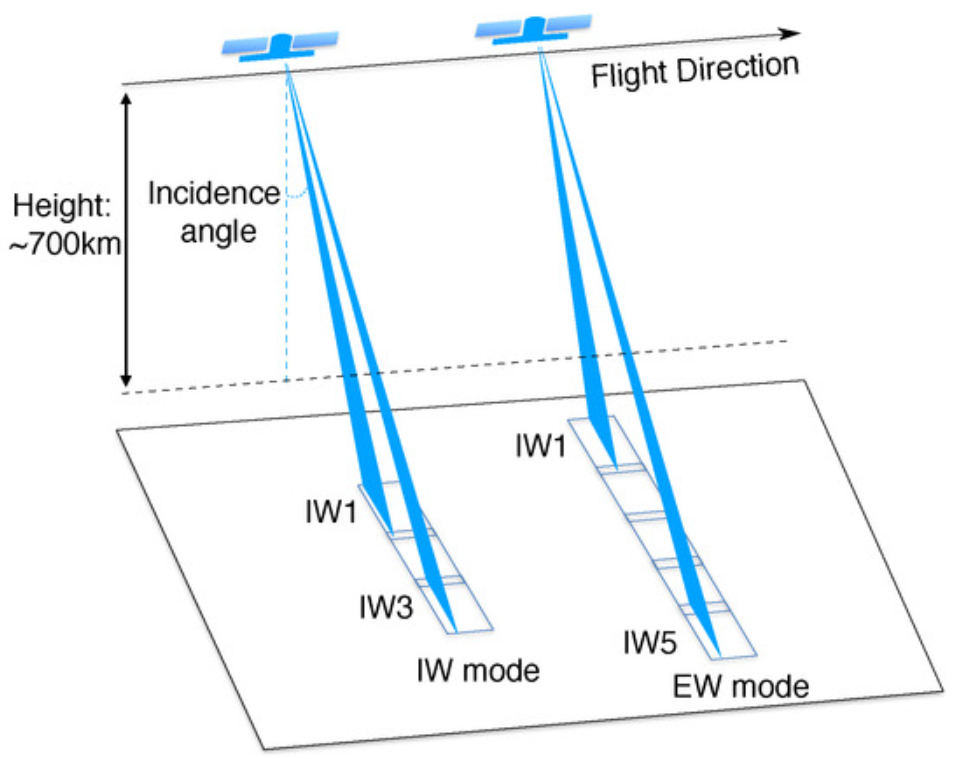
EW 模式的工作方式类似于 IW 模式,采用 TOPSAR 技术,使用五个子带而不是三个,导致分辨率较低(20 m x 40 m)。EW 模式和 IW 模式类似,同样可用于干涉测量。
# 波浪(WV)模式
SENTINEL-1的WV模式与全球海浪模型相结合,用以确定海洋上波浪的方向、波长和高度。
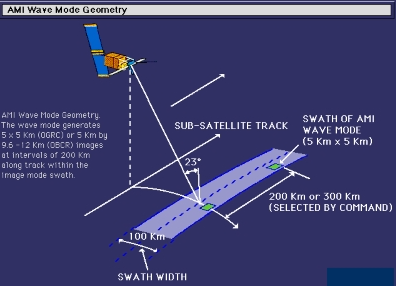
波模式由 20 公里 x 20 公里的条带图像组成,传感器两个不同的入射角上交替采集。每 100 公里采集一次波图像,同一入射角的影像相隔 200 公里。
# 产品介绍
目前欧空局官网上提供4种产品数据下载,分别是原始数据RAW、SLC、GRD和OCN。

生成一级数据产品所涉及的处理步骤包括预处理、多普勒质心估计、单视复聚焦、生成 SLC 产品、生成GRD 产品、影像后处理和用于组装多个子的模式特定处理。具体的生成过程如下所示:
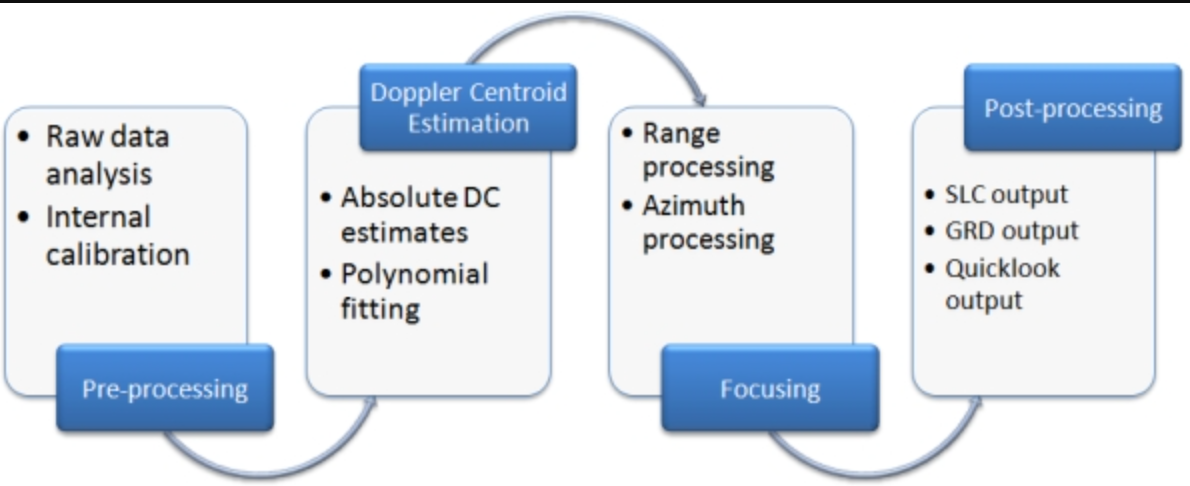
1 级数据可以处理成单视复数 (SLC) 和/或地面范围检测 (GRD) 产品。
SLC 产品保留了相位信息并以自然像素间距进行处理。
GRD 产品包含检测到的幅度并进行多视以减少散斑的影响。
OCN是针对Wave Mode推出的2级产品。
# 数据下载
仅限目前我知道的,一共有四种方法可以下载:
- 欧空局官网 (https://scihub.copernicus.eu/)
- 地理空间数据云 (http://www.gscloud.cn/)
- Google Earth Engine (https://code.earthengine.google.com/)
- PIE Engine (https://engine.piesat.cn/engine/home)

我这里比较推荐大家使用地理空间数据云进行下载,主要是两个原因:数据更新及时;国内下载速度快。
地理空间数据云操作比较简单,不再做介绍。这里介绍官网的下载教程:
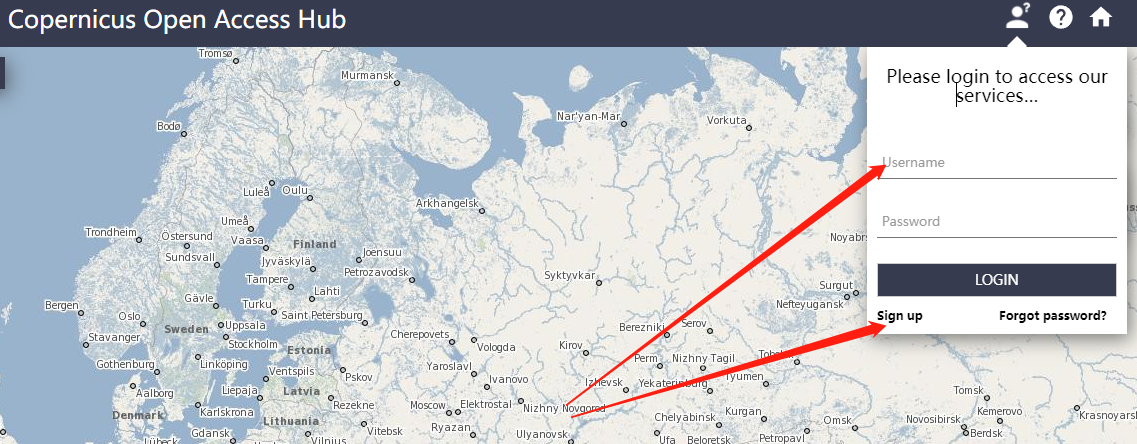
进入欧空局官网(https://scihub.copernicus.eu/):
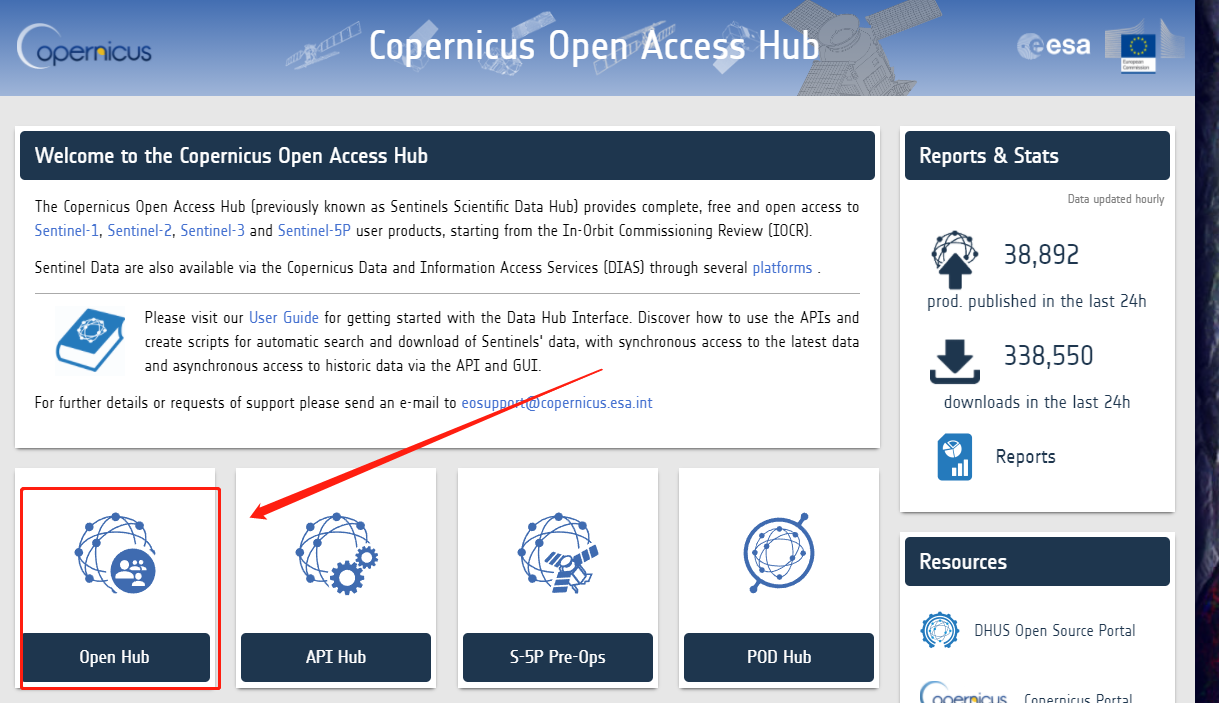
点击进入Open Hub,如果有账号直接登录,没有账号点击Sign up:
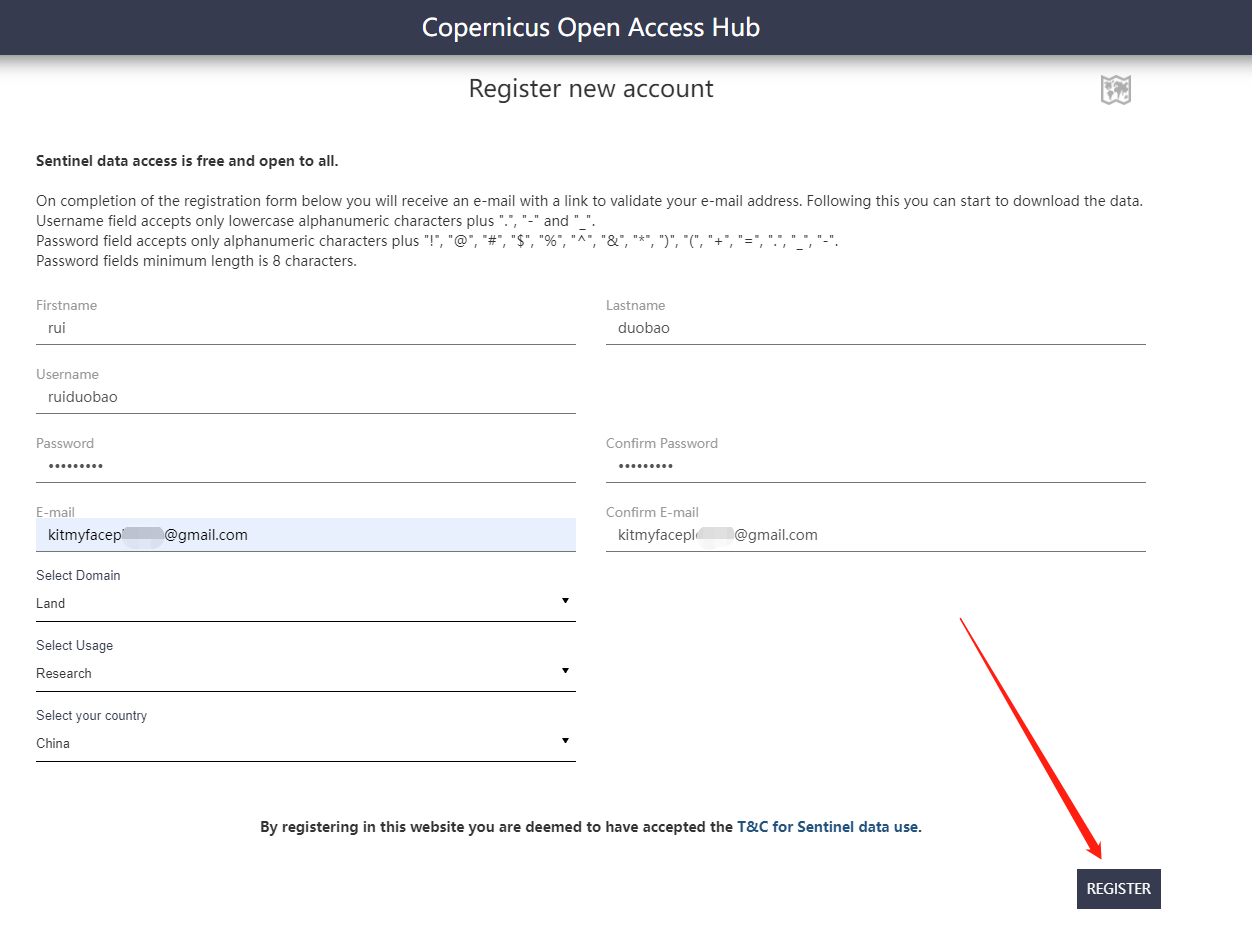
按要求填写个人资料,完成后点击Register:
之后会弹出一个窗口,需要去自己的邮箱激活账号,进入自己的邮箱中跳转激活链接即可:
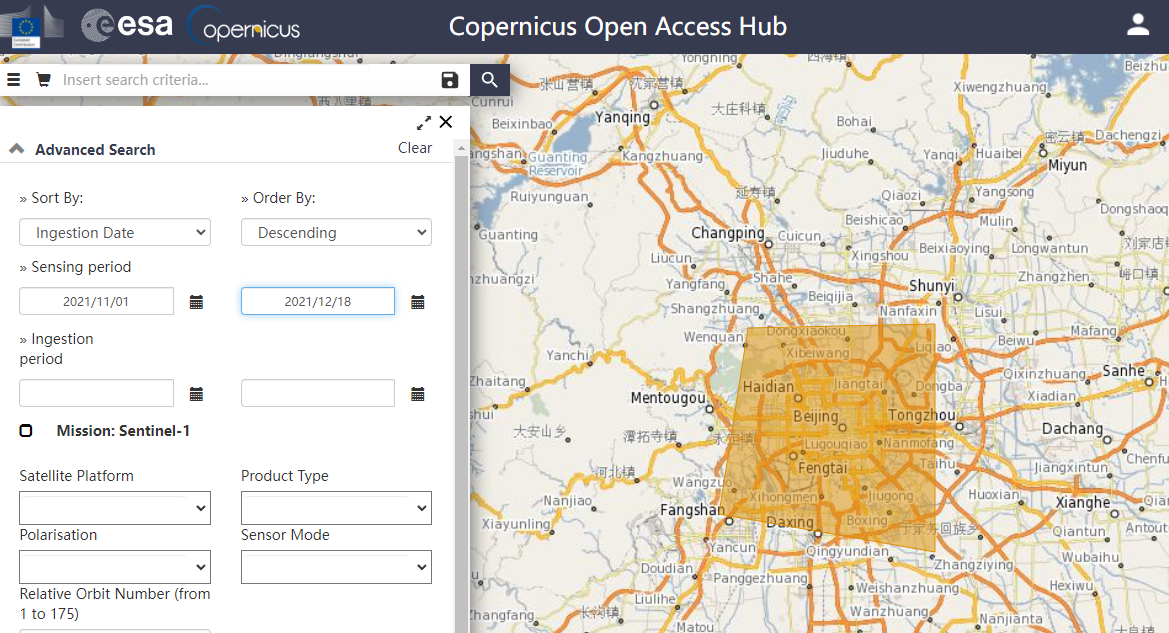
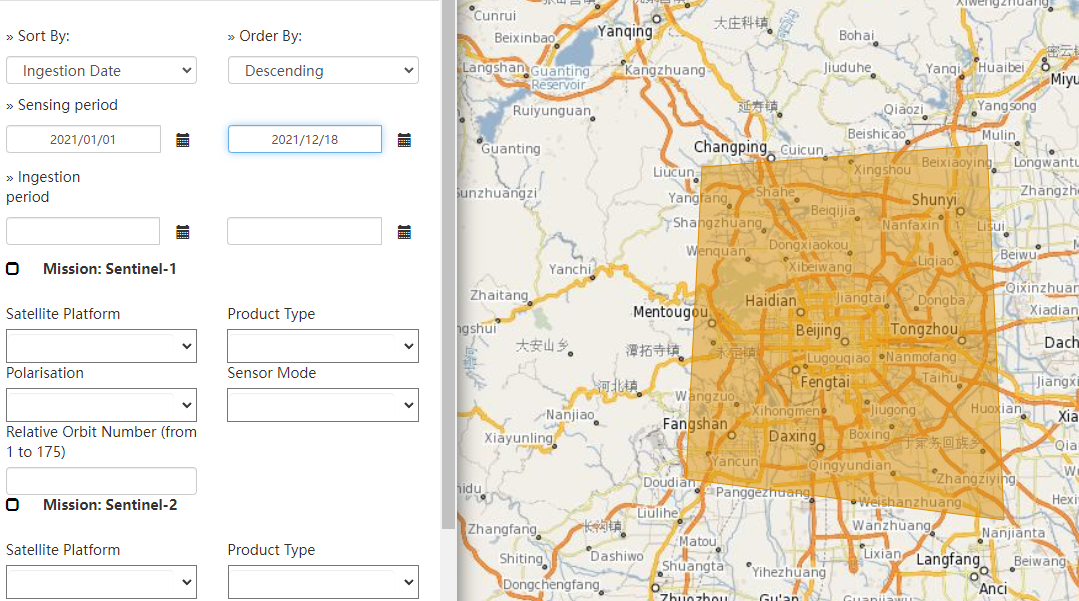
账号激活后,登录主页面,鼠标左键勾选待下载区域影像:

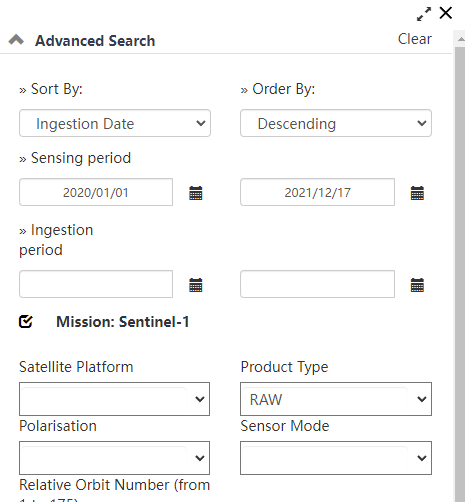
点击数据栏,进行数据筛选:

在数据筛选栏,选择时间(两个时间sensing period和ingestion period,个人理解是采样时间和入库时间,未查到相关资料,一般来说选sensing period就行了)、极化方式、卫星、产品类型等:
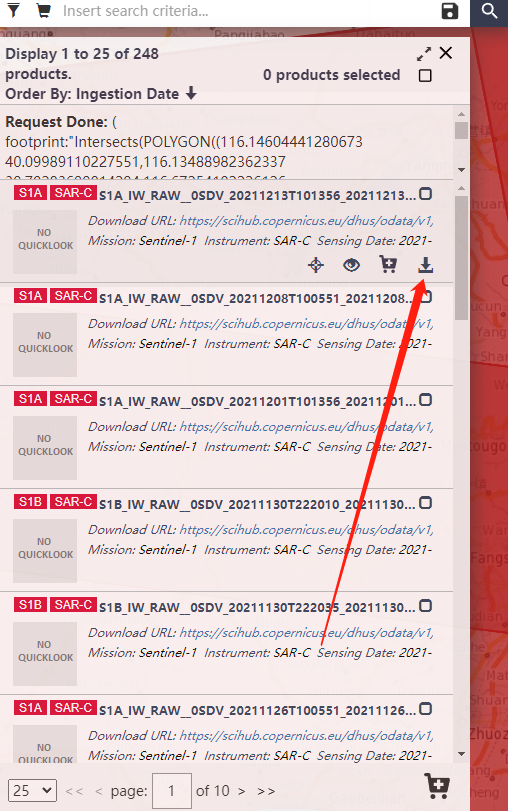
点击搜素按钮,会弹出相应影像,点击下载即可:
# 哨兵二号
Sentinel-2 任务由两颗极轨卫星Sentinel-2A(2015年6月23日发射)和Sentinel-2B( 2017年3月7日发射)组成,分布在同一太阳同步轨道上,彼此成 180° 相位,幅宽为290 公里。

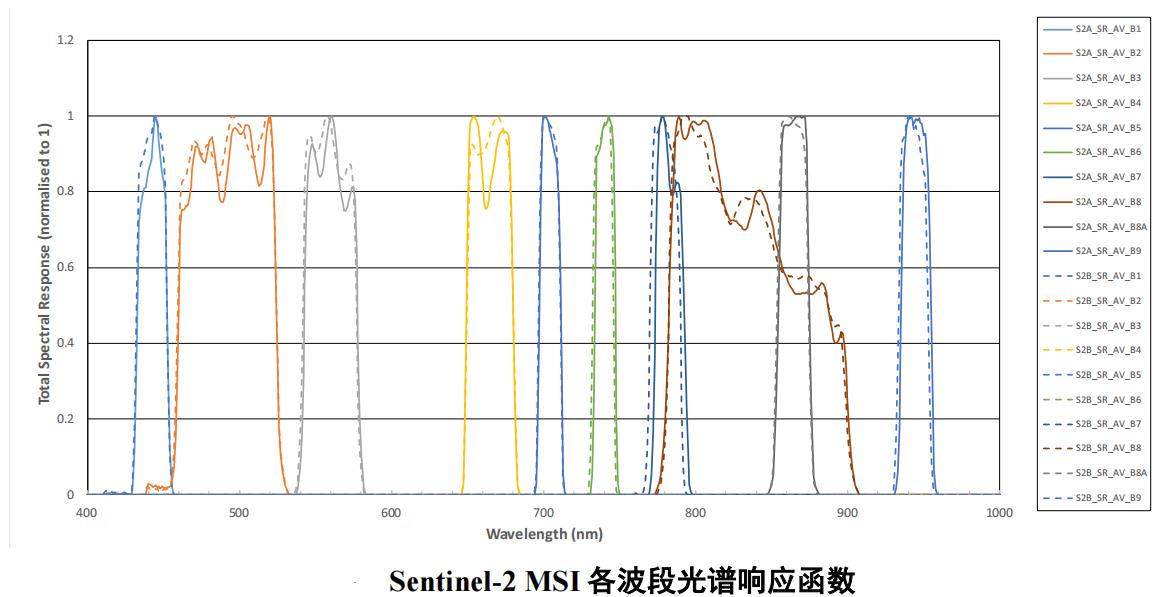
# 波段介绍
每颗 Sentinel-2 卫星都携带一个多光谱仪器 (MSI),在可见光、近红外和短波红外光谱范围中共有 13 个波段。
| 波段 | 中央波长 (µm) | 空间分辨率 (m) |
|---|---|---|
| 波段 1 -沿海气溶胶 | 0.443 | 60 |
| 波段2 – 蓝 | 0.490 | 10 |
| 波段3 – 绿 | 0.560 | 10 |
| 波段4 – 红 | 0.665 | 10 |
| 波段5 – 植被红边 | 0.705 | 20 |
| 波段6 -植被红边 | 0.740 | 20 |
| 波段7 -植被红边 | 0.783 | 20 |
| 波段8 – 近红外 | 0.842 | 10 |
| 波段8A -植被红边 | 0.865 | 20 |
| 波段9 – 水蒸气 | 0.945 | 60 |
| 波段10 -Cirrus | 1.3735 | 60 |
| 波段11 -短波红外线 | 1.610 | 20 |
| 波段12 -短波红外线 | 2.190 | 20 |
# 波段组合
我们通过使用波段组合来更好地解释图像中的要素特征,其目的是以创造性的方式重新安排可用的波段。
通过使用波段组合,我们可以从图像中提取特定的信息。例如,某些波段组合可以突出图像中的地质、农业或植被特征。如果您想亲自查看 Sentinel 波段组合,那么可以查看 Sentinel Playground,它能够显示更多的波段组合情况。
# 自然色 (B4, B3, B2)

自然色波段组合以红色 (B4)、绿色 (B3) 和蓝色 (B2) 三种方式来呈现,其目的是以我们眼睛看待世界的方式来显示图像,正如我们所看到的,健康的植被是绿色的,城市通常以白色和灰色来表示,而水是深蓝色的,不过这取决于它的清洁程度。
自然色带组合使用红色(B4)、绿色(B3)和蓝色(B2)波段。其目的是以我们的眼睛看世界的方式显示图像。正如我们所看到的,健康的植被是绿色的,城市通常以白色和灰色来表示。水是深蓝色的,不过这取决于它的清洁程度。
# 彩色红外线 (B8, B4, B3)

彩色红外波段组合旨在强调健康和不健康的植被情况。通常使用近红外 (B8) 波段,尤其是它特别擅长反射叶绿素的特点。这就是为什么在彩色红外图像中,较密集的植被是红色的,而城市地区是白色的。
# 短波红外线 (B12, B8A, B4)

短波红外波段组合使用 SWIR (B12)、NIR (B8A) 和红色 (B4)三种波段。该合成图显示了各种绿色深浅的植被情况。一般来说,较深的绿色表示植被较密集,棕色表示的是裸露的土壤和建筑区域。
# 农业 (B11, B8, B2)

农业波段组合使用 SWIR-1 (B11)、近红外 (B8) 和蓝色 (B2)三种波段。它主要用于监测作物的健康状况,它使用短波和近红外线,这两个波段都特别擅长突出显示深绿色的茂密植被区域。
# 地质波段 (B12, B11, B2)

地质波段组合是寻找地质特征的巧妙应用,包括断层、岩性和地质构造。地质学家往往会通过 SWIR-2 (B12)、SWIR-1 (B11) 和蓝色 (B2) 波段的特征来处理,不过他们往往更倾向于使用 Sentinel 波段组合进行分析。
# 水深测量 (B4, B3, B1)

顾名思义,水深测量波段组合有利于海岸的研究。水深测量波段组合使用的是红色 (B4)、绿色 (B3) 和海岸带 (B1),同样,沿海大气气溶胶波段的使用有利于估算水中的悬浮沉积物状况。
# 植被指数 (B8-B4)/(B8+B4)
近红外表示植被强烈反射,红光表示植被吸收情况。植被指数有利于量化植被的数量。归一化植被指数的公式为(B8-B4)/(B8+B4)。高值表示茂密的树冠,低值或负值表示城市和水景。
由于近红外(植被强烈反射)和红光(植被吸收)的特点,植被指数有利于量化植被数量。归一化差值植被指数的公式为 (B8-B4)/(B8+B4),其中高值表示树冠致密的情况,低值或负值表示城市和水景区域。
# 水分指数 (B8A-B11)/(B8A+B11)
水分指数是寻找植物水分压力的理想选择方式。它使用短波和近红外来生成水分含量指数,一般来说,较潮湿的植被具有较高的值,而较低的水分指数值表明植物因水分不足而受到的压力值。
# 产品介绍
目前Sentinel-2主要提供两种产品数据:L1C和L2A。
L1C:该产品经正射校正和亚像元级几何精校正,为天顶表观反射率数据,每张影像为100 公里 x 100 公里,大小约为 500 MB。
L2A:该产品是利用欧空局官方提供的 Sen2cor工具,对 L1C 进行大气校正得到地表反射率数据产品。从2016年10月起提供全欧洲的数据,从2017年1月起提供全球的数据。
# 数据下载
# 数据下载方式
根据笔者查到的资料,目前能下载Sentinel-2影像的网站有5个,分别为:
| 网站 | 网址 | 备注 |
|---|---|---|
| 欧空局官网 | https://scihub.copernicus.eu | 官网 |
| 地理空间数据云 | http://www.gscloud.cn | 延后一周更新 |
| Google Earth Engine | https://earthengine.google.com | 最靠谱的云计算平台,数据及时并全面 |
| PIE Engine | https://engine.piesat.cn/engine/home | 缺失2017年前的数据 |
| Microsoft Planetary Computer | https://planetarycomputer.microsoft.com | 只有L2A级别数据 |
# 官网下载方式
我们采用官网的方式进行数据下载:
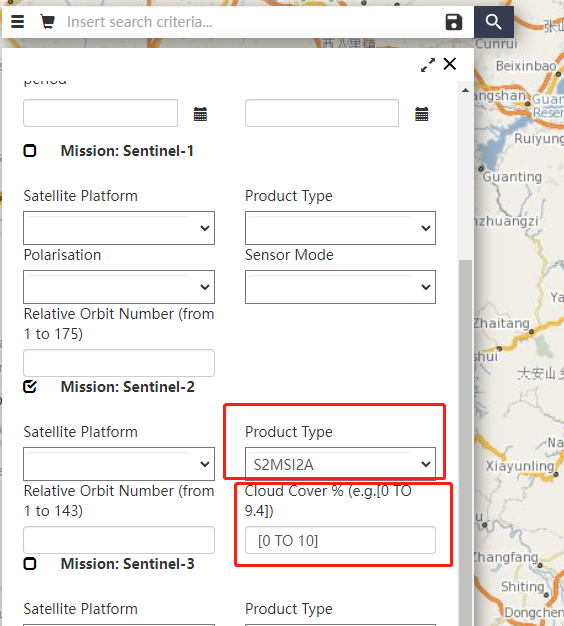
参考哨兵1号卫星数据下载方式,注册账号后进入主页面,并勾选研究区,选择时间:
哨兵二号共有4个参数选择,分别是选择卫星、产品类别、相对轨道、云覆盖率,一般来说只选择产品级别和云覆率。需要注意,云覆盖率的选择方式为中括号加条件,比如[0 TO 10]代表只选择云覆盖率在0-10%的影像:
筛选完成后即可点击下载:
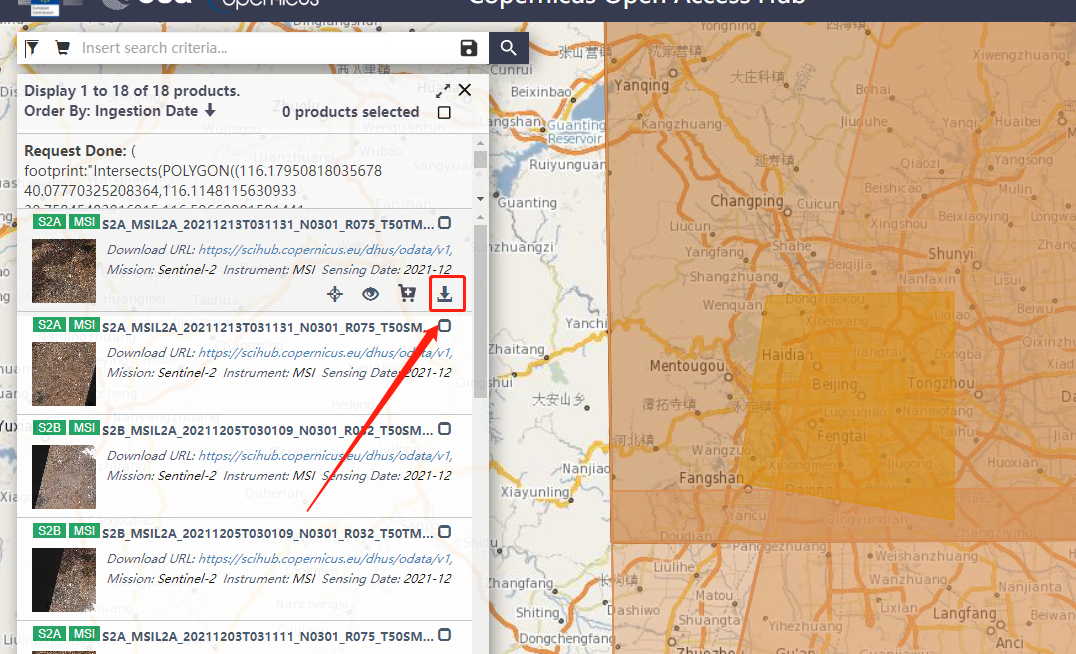
如果你是下载数年前的影像,有可能该影像已被下架,你需要提交申请,大概一天后即可下载。比如我要下载2019年北京地区的Sentinel-2 L2A数据,
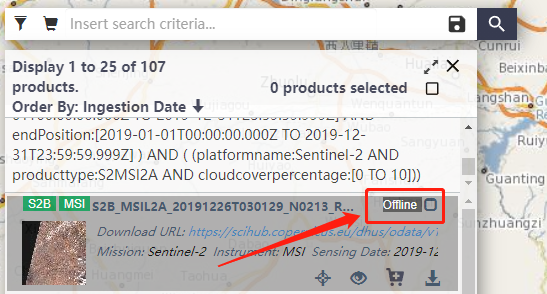
这时显示的是数据已下架,你需要加入购物车,再点击下载会弹出该数据会进行重新上架,最迟一周,最短1天该数据即可下载。
# GEE下载数据
官网的数据下载方式还得在本地做波段合成、裁剪和镶嵌,甚至还会遇到数据已下架的情况。因此笔者一般不喜欢官网下载。
如果你只是想下载某地区的哨兵数据,不做研究,可以考虑直接GEE下载,方便快捷。我这里列一个简单的数据下载脚本,仅供参考:
//研究区可视化
Map.addLayer(roi)
Map.centerObject(roi,9)
//时间
var startDate = ee.Date('2021-5-27');
var endDate = ee.Date('2021-8-31');
var collection = SENTINEL
.filterDate(startDate, endDate)//时间过滤
.filterBounds(roi)//位置过滤
.filter(ee.Filter.lt('CLOUDY_PIXEL_PERCENTAGE',10))//云量过滤,
.sort('CLOUDY_PIXEL_PERCENTAGE')//云量排序
.first() ;//选择云量最小的影像
//裁剪研究区
var image=collection.clip(roi);
//选择导出的波段
image=image.select([ "B2", "B3", "B4", "B8"]);
//加载假彩色影像
Map.addLayer(image, imageVisParam, "image-假彩色");
//加载真彩色影像
Map.addLayer(image, imageVisParam2, "image-真彩色");
//导出
Export.image.toDrive({
image: image,
description: 'ROI',
scale: 10,
region: roi,
maxPixels:1e13
});
完整代码的可运行链接:
https://code.earthengine.google.com/2af1e4b4d6ce7eeb6a2e029c29266748
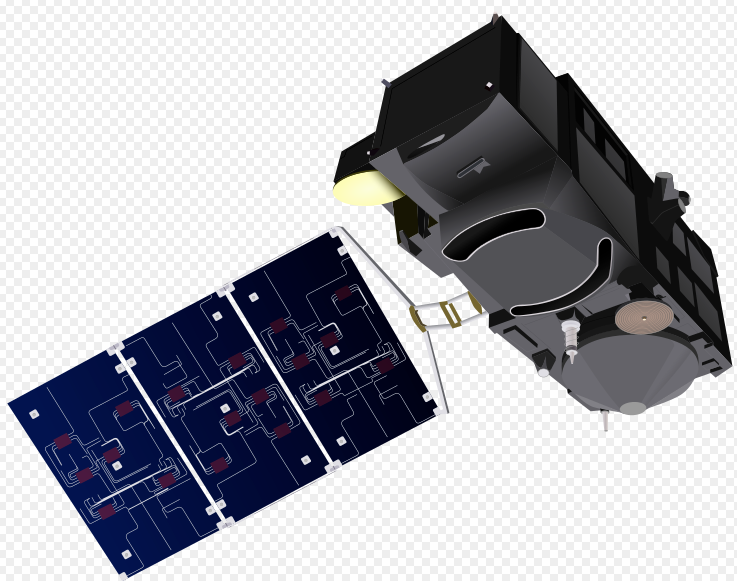
# 哨兵三号
截至 2021 年12月,Sentinel-3由2颗卫星组成:Sentinel-3A和Sentinel-3B。欧空局计划将分别在 2024 年和 2028 年发射Sentinel-3C 和 Sentinel-3D卫星,以确保 Sentinel-3 任务的连续性。Sentinel-3 也是目前搭载传感器最多的一颗卫星,共计7类传感器。
# 传感器
这里分别对Sentinel-3的七种传感器进行介绍:
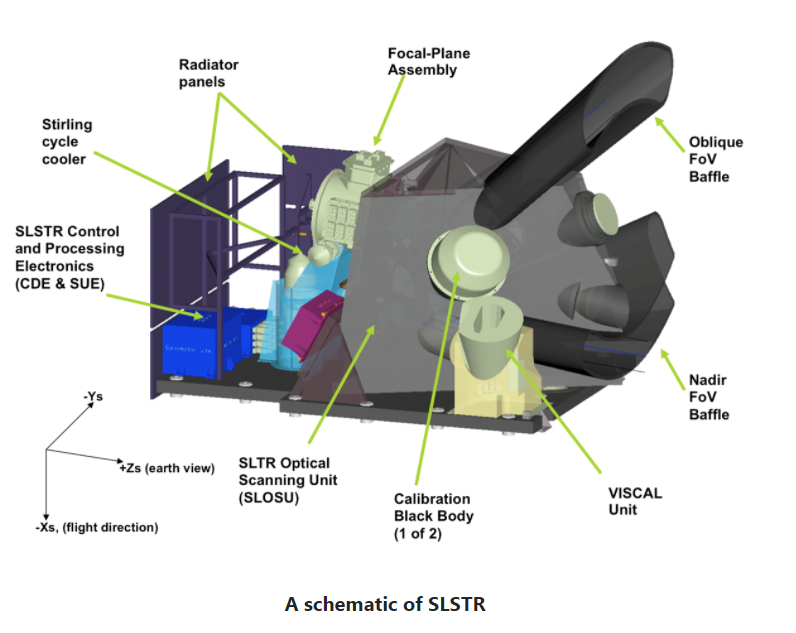
- 海陆表面温度辐射计(SLSTR):用来确定全球海面温度。它在九个光谱通道和两个额外的波段进行测量,以优化火灾监测。前六个光谱带涵盖可见光、近红外光谱以及短波红外;VNIR 适用于频段 1 至 3,SWIR 适用于频段 4 至 6。这 6 个频段的空间分辨率为 500 m,频段 7 至 9 以及另外两个频段的空间分辨率为1 公里。
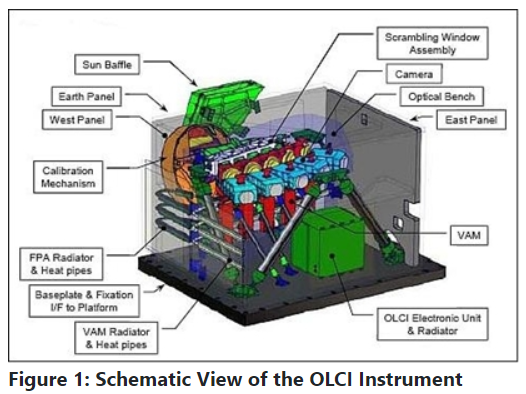
- 海洋和陆地色彩仪器(OLCI):一种中等分辨率的成像光谱仪,它使用五个摄像头来提供广阔的视野。OLCI 有 21 个光谱带,波长范围从光学到近红外。波段的宽度从 400 nm到 1020 nm不等,可用于测量水蒸气吸收、气溶胶水平和叶绿素吸收。SLSTR 和 OLCI 是具有重叠路径的光学仪器,允许新的组合应用。由于气候变化因素,内陆沿海地区已成为越来越受关注的地区,从 2002 年到 2012 年,中分辨率成像光谱仪 (MERIS) 提供了用于分析的高质量观测。OLCI 对 MERIS 进行了改进,因为它增加了六个光谱带、更高的信噪比 (SNR)、减少了太阳眩光、最大 300 m 的空间分辨率以及增加的地面覆盖范围,这是目前太空中唯一能够检测蓝藻的传感器。
合成孔径雷达高度计(SRAL):地形仪器,可在海冰、冰盖、河流和湖泊上提供准确的地形测量。它使用双频Ku和C 波段,并由大气校正的微波辐射计(MWR) 和轨道定位的 DORIS 接收器支持。
卫星综合多普勒轨道图和无线电定位(DORIS) :一种用于轨道定位的接收器。
微波辐射计(MWR):测量水蒸气、云中的水含量以及地球发出的热辐射。MWR 传感器的辐射精度为 3.0 K。
激光回射器(LRR):用于使用激光测距系统准确定位在轨卫星。当与 SRAL、DORIS、MWR 结合使用时,它们将获得海洋和内陆水域的详细地形测量结果。
全球导航卫星系统(GNSS):提供精确的轨道确定并可以同时跟踪多颗卫星。
# 产品类型介绍
SLSTR:
Level-1经过质量控制、正射定位(纬度和经度坐标、高度)、地标和初步像素分类(例如土地/水/云掩码)。
Level-2 是从Level-1 产品中提供的测量数据得出地球物理量,专门用于海洋和陆地应用领域。
**OLCI **:
Level-1包括大气顶 (TOA) 辐射测量、辐射校正、校准和光谱表征。
Level-2 是从Level-1 产品中提供的测量数据得出地球物理量。
**Synergy **:
SYN Level-1处理 OLCI 和 SLSTR 辐射度和亮度温度,其关联的注释进行相同计算。同时也计算 OLCI 参考通道与所有其他 OLCI 和 SLSTR 通道之间的对应网格。 SYN Level-2处理来自 OLCI 和 SLSTR 仪器的信息,为地表分析提供改进的数据。
Altimetry :
Level-1 是 Level-0 数据进行仪器校正后的数据。 Level-2 是Level-1 数据进行地球物理校正后的数据 。
# 数据下载方式
根据笔者查到的资料,目前能下载全部Sentinel-3影像的网站只有欧空局官网(https://scihub.copernicus.eu),GEE只能下载OLCI EFR影像,因此采用官网的下载方式:
参考哨兵1号卫星数据下载方式,注册账号后进入主页面,并勾选研究区,选择时间:
选择相应的哨兵三号的产品数据(由于产品类型选项与传感器、级别数据互不相干,只建议在产品类型或者相应传感器里面勾选条件):

选择适合的数据,进行数据下载:

# 哨兵四号
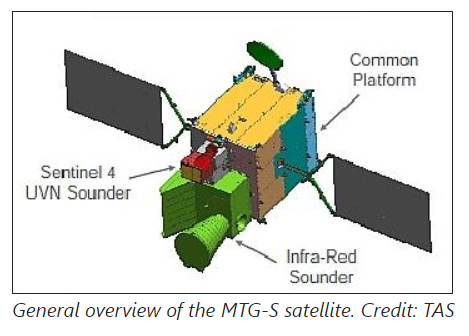
哨兵四号暂未发射,该卫星的主要目标是监测欧洲上空的空气质量和气溶胶, 以高空间分辨率和快速重访时间支持哥白尼大气监测服务 (CAMS)。该卫星将由欧盟、欧洲航天局 (ESA) 与欧洲环境署 (EEA) 共同运营。
# 哨兵五号
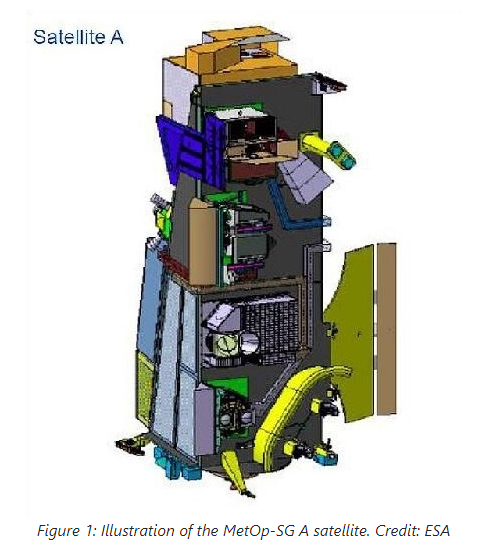
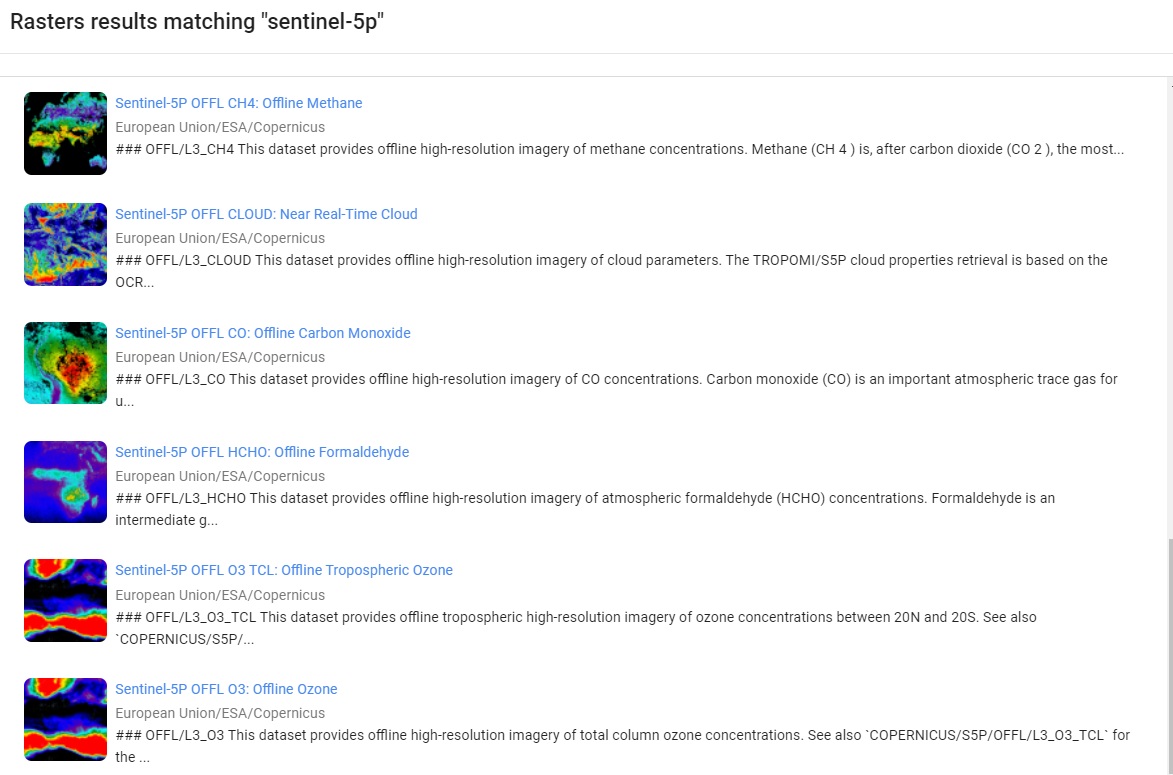
该卫星暂未发射,预计2021-2022年发射。Sentinel-5 将专注于空气质量和成分-气候相互作用,主要数据产品为 O3、NO 2、SO2、HCHO 和气溶胶。此外,Sentinel-5 还将提供 CO、CH4 和平流层 O3 的质量参数,每天覆盖全球气候、空气质量、臭氧、地表紫外线影像。
# 哨兵5p
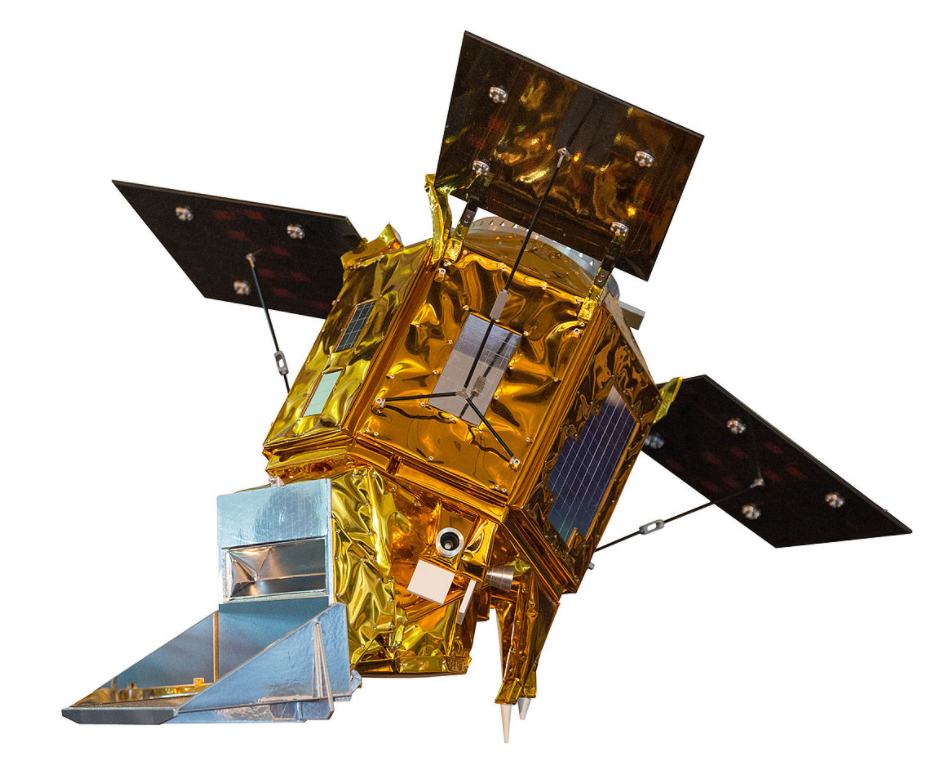
哨兵5p于2017 年 10 月 13 日从俄罗斯普列谢茨克航天发射场成功发射,拥有一颗携带对流层监测仪器 (TROPOMI) 传感器,主要目标是执行具有高时空分辨率的大气测量,用于空气质量、臭氧和紫外线辐射以及气候监测和预测。
# 传感器
Tropomi(TROPO spheric Monitoring Instrument,对流层监测仪)可感应紫外(UV)、可见光(VIS)、近(NIR)和短波红外(SWIR),以监测在大气中的臭氧、甲烷、甲醛、气溶胶、一氧化碳、NO2 和SO2 。
Tropomi 每秒进行一次测量,覆盖约 2600 公里宽和 7 公里长的区域,分辨率为 7 x 7 公里。该传感器使用光栅光谱仪分离成不同的波长,然后再用四个不同的检测器对各自的光谱带进行测量。UV光谱仪的光谱范围为270-320 nm,可见光光谱仪的范围为310-500 nm,NIR的范围为675-775 nm,SWIR的范围为2305-2385 nm。
# 数据下载
使用GEE和PIE进行数据下载。
# 数据介绍与处理
Sentinel-5P是欧空局于2017年10月13日发射的一颗全球大气污染监测卫星。卫星搭载了对流层观测仪(Tropospheric Monitoring Instrument,TROPOMI),可以有效的观测全球各地大气中痕量气体组分,包括NO2、O3、SO2、 HCHO、CH4和CO等重要的与人类活动密切相关的指标,加强了对气溶胶和云的观测。
本文由三大主要部分组成:
TROPOMI数据介绍
数据下载
数据处理与可视化
- Panoply可视化
- S5Processor包nc转TIFF
# TROPOMI数据介绍
TROPOMI是目前世界上技术最先进、空间分辨率最高的大气监测光谱仪。成像幅宽达2600km,每日覆盖全球各地,成像分辨率达7km×3.5km。ESA提供了L1B和L2两种级别的数据下载。L1B数据介绍如表1所示,L2如表2所示。
# L1B产品介绍
表1.L1B数据产品介绍和对应的用户文档
| File type | Spectrometer | Spectral range [nm] | Comment | User Documentation |
|---|---|---|---|---|
| L1B_RA_BD1 | UV | 270 - 300 | Radiance product band 1 | |
| L1B_RA_BD2 | 300 - 320 | Radiance product band 2 | ||
| L1B_RA_BD3 | UVIS(紫外-可见光过渡区域) | 320 - 405 | Radiance product band 3 | ATBD |
| L1B_RA_BD4 | 405 - 500 | Radiance product band 4 | ||
| L1B_RA_BD5 | NIR | 675 - 725 | Radiance product band 5 | |
| L1B_RA_BD6 | 725 - 775 | Radiance product band 6 | PRF | |
| L1B_RA_BD7 | SWIR | 2305-2345 | Radiance product band 7 | |
| L1B_RA_BD8 | 2345-2385 | Radiance product band 8 | ||
| IR_UVN | UVN | 270-775 | Irradiance product UVN module | Other |
| IR_SIR | SWIR | 2305-2385 | Irradiance product SWIR module | documents |
- IODS (Input Output Data Specification):description of the products that are the result from the Level 0 to Level 1bprocessing介绍了L0到L1B数据的处理过程;
- ATBD (Algorithm Theoretical Basis Document): high leveldescription of the algorithms used in the Level-0 to 1b data processing介绍了L0到L1B数据处理算法原理
- PRF (Product Readme File): description of changesbetween different product versions and overall quality information (available afew months after launch)介绍了不同版本数据间的差别和总体的质量信息。
# L2产品介绍
表2.L2数据产品介绍和数据文档
| Product type | Parameter | User Documents |
|---|---|---|
| L2__O3____ | Ozone (O3) total column总柱含量 | PRF-O3-NRTI, PRF-03-OFFL, PUM-O3, ATBD-O3, IODD-UPAS |
| L2__O3_TCL | Ozone (O3) tropospheric column对流层柱含量 | PRF-03-T, PUM-O3_T, ATBD-O3_T, IODD-UPAS |
| L2__O3__PR | Ozone (O3) profile总剖面数据 | PUM-PR , ATBD-O3_PR , IODD-NL |
| L2__O3_TPR | Ozone (O3) tropospheric profile对流层剖面数据 | PUM-PR , ATBD-O3_PR , IODD-NL |
| L2__NO2___ | Nitrogen Dioxide (NO2), total and tropospheric columns总柱和对流层柱含量 | PRF-NO2, PUM-NO2, ATBD-NO2, IODD-NL |
| L2__SO2___ | Sulfur Dioxide (SO2) total column总柱含量 | PRF-SO2, PUM-SO2, ATBD-SO2, IODD-UPAS |
| L2__CO____ | Carbon Monoxide (CO) total column总柱含量 | PRF-CO, PUM-CO, ATBD-CO, IODD-NL |
| L2__CH4___ | Methane (CH4) total column总柱含量 | PRF-CH4, PUM-CH4, ATBD-CH4, IODD-NL |
| L2__HCHO__ | Formaldehyde (HCHO) total column总柱含量 | PRF-HCHO, PUM-HCHO , ATBD-HCHO , IODD-UPAS |
| L2__CLOUD_ | Cloud fraction, albedo, top pressure云量、反照率、云顶大气压 | PRF-CL, PUM-CL, ATBD-CL, IODD-UPAS |
| L2__AER_AI | UV Aerosol Index紫外区域气溶胶指数 | PRF-AI, PUM-AI, ATBD-AI, IODD-NL |
| L2__AER_LH | Aerosol Layer Height (mid-level pressure)气溶胶层高度(中等气压) | PRF-LH, PUM-LH , ATBD-LH , IODD-NL |
| UV product1 | Surface Irradiance/erythemal dose | - |
| L2__NP_BDx, x=3, 6, 7 2 | Suomi-NPP VIIRS Clouds云产品辅助数据 | PRF-NPP, PUM-NPP, ATBD-NPP |
- PUM (Product User Information): information on the technicalcharacteristics of the S5P/TROPOMI Level 2 products 介绍了L2数据产品的技术特征
- ATBD (Algorithm Theoretical Basis Document): detailedinformation on the retrieval algorithms理论算法说明文档
- IODD (Input Output Data definition): description of the inputand output data of the S5P/TROPOMI Level 2 processing介绍了L2数据产品输入和输出数据情况及处理过程
- PRF (Product Readme File): description of changesbetween different product versions and overall quality information (availablefew months after launch) 介绍了不同版本数据间的差别和总体的质量信息。
# L2数据三种数据流
L2数据产品又分为了三种数据流:
- 近实时数据流(near-real-time, NRTI),卫星成像3小时后即可获取,数据可能不完整或存在质量缺陷;
- 离线数据流(Offline, OFFL),一般成像后几天即可获得;
- 再次处理数据流(Reprocessing, RPRO),有些数据可能经过了多次处理,获得的最新的质量最佳的版本。
一般情况下,长期的时序变化研究不可以混用不同级别的数据流,推荐使用最新的RPRO数据以保证数据质量。
# 数据下载
Sentinel-5P数据公开下载,直接从以下网址检索影像并下载,无需注册和翻墙,直接使用ESA提供的访客帐号即可。帐号密码均为:s5pguest
数据下载网址:https://s5phub.copernicus.eu/dhus/#/home
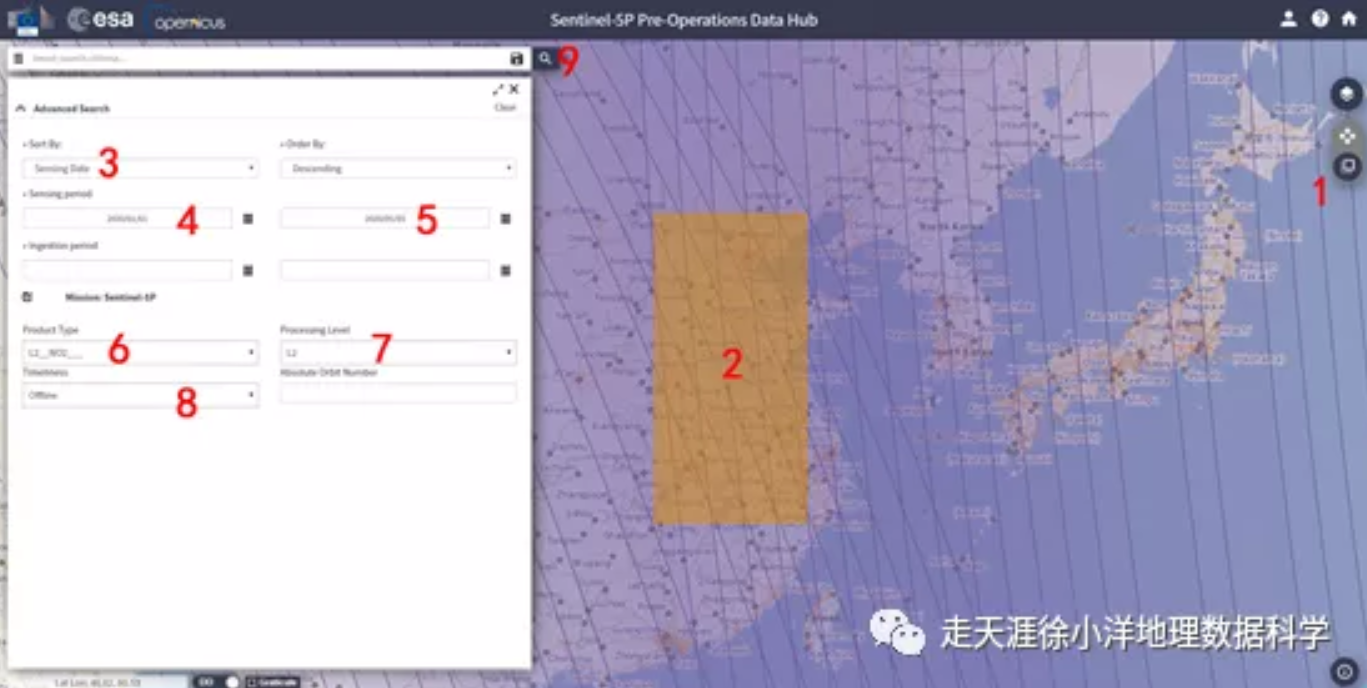
打开S5P下载地址并登陆访客帐号,如下图所示进行操作:
- 切换矩形选框定位
- 绘制研究区范围,确定影像下载位置
- 选择搜索方式,这里是Sensing Date,也就是成像日期,根据成像日期筛选影像
- 开始时间,从这个时间点开始的影像会加入选择
- 结束时间,选择这个时间点之前的影像
- 选择影像产品类型,具体影像产品类型说明请参见前面的表1,表2
- 处理级别,可选,指定了6,7也就确定了
- 数据流,如果是实时动态监测,选择NRTI实时动态数据流,一般研究选OFFL,处理好的质量可靠的影像,RPRO数量较少
- 开始查询,搜索影像
接下来就可以查看搜索结果,如下图所示:
- 数据下载链接,可以直接复制链接在IDM里面下载(哨兵数据下载推荐使用IDM下载器)
- 查看影像详细信息,在这里可以查看影像的具体覆盖范围、成像时间等详细情况
- 影像下载按钮,点击这个可以直接下载

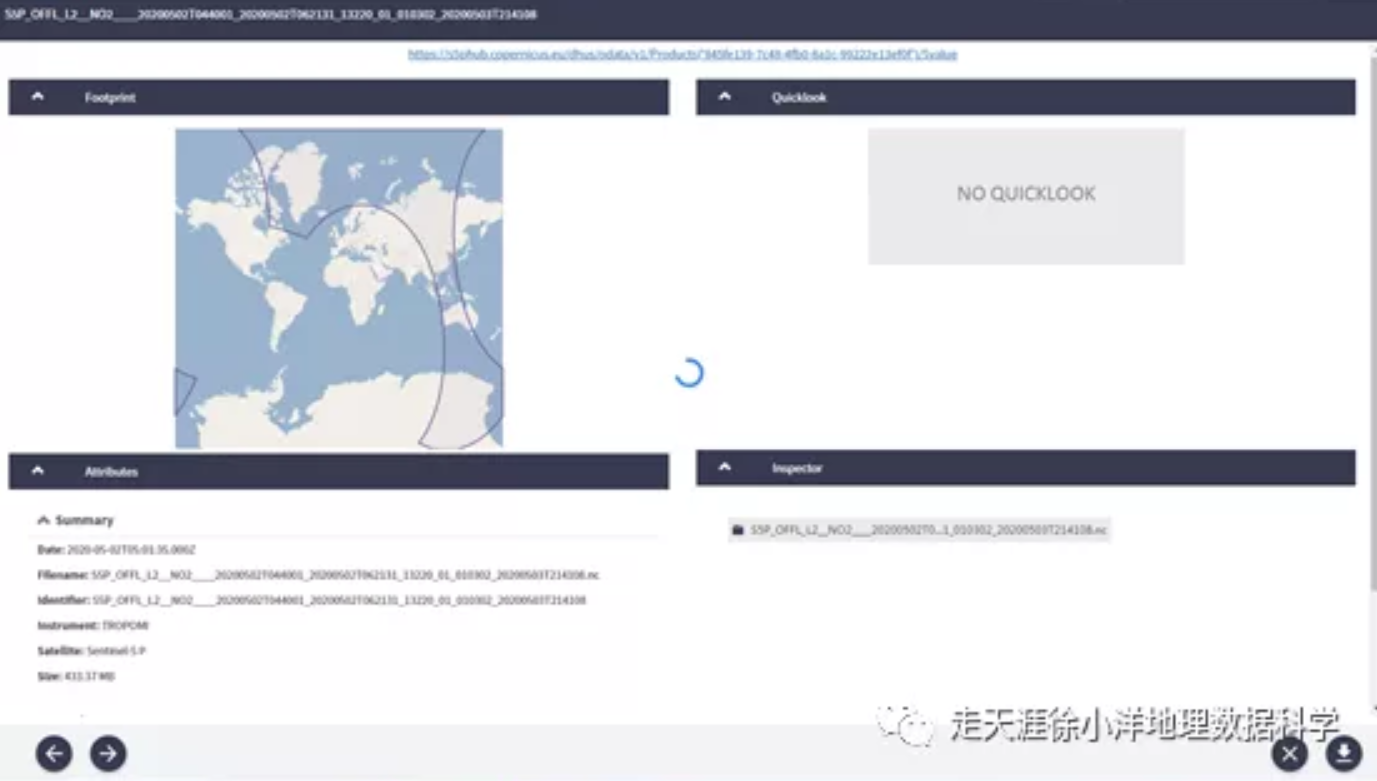 点击上图按钮2后,详细信息情况
点击上图按钮2后,详细信息情况
# 数据处理与可视化
在这里提供两种处理和可视化S5P数据的方法:NASA Panoply软件包和R语言S5Processor程序包。
# NASA Panoply
Panoply是NASA开发的一款基于JAVA的netCDF/HDF/GRIB数据查看器。下载地址:https://www.giss.nasa.gov/tools/panoply/
 运行需要JAVA环境,安装好JAVA环境后,解压程序包,双击Panoply.exe即可运行
运行需要JAVA环境,安装好JAVA环境后,解压程序包,双击Panoply.exe即可运行
加载影像后,选择里面的数据产品进行可视化:
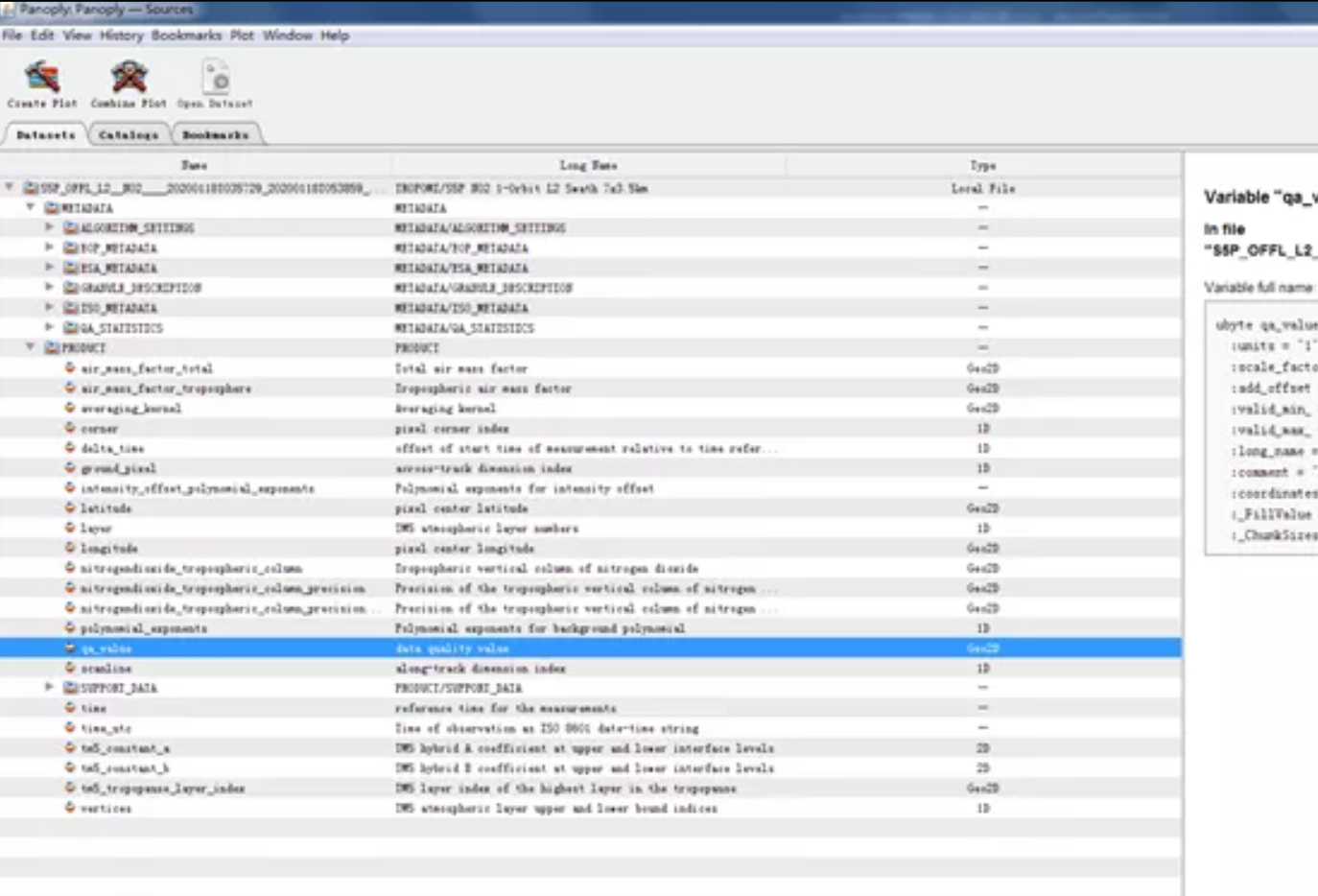
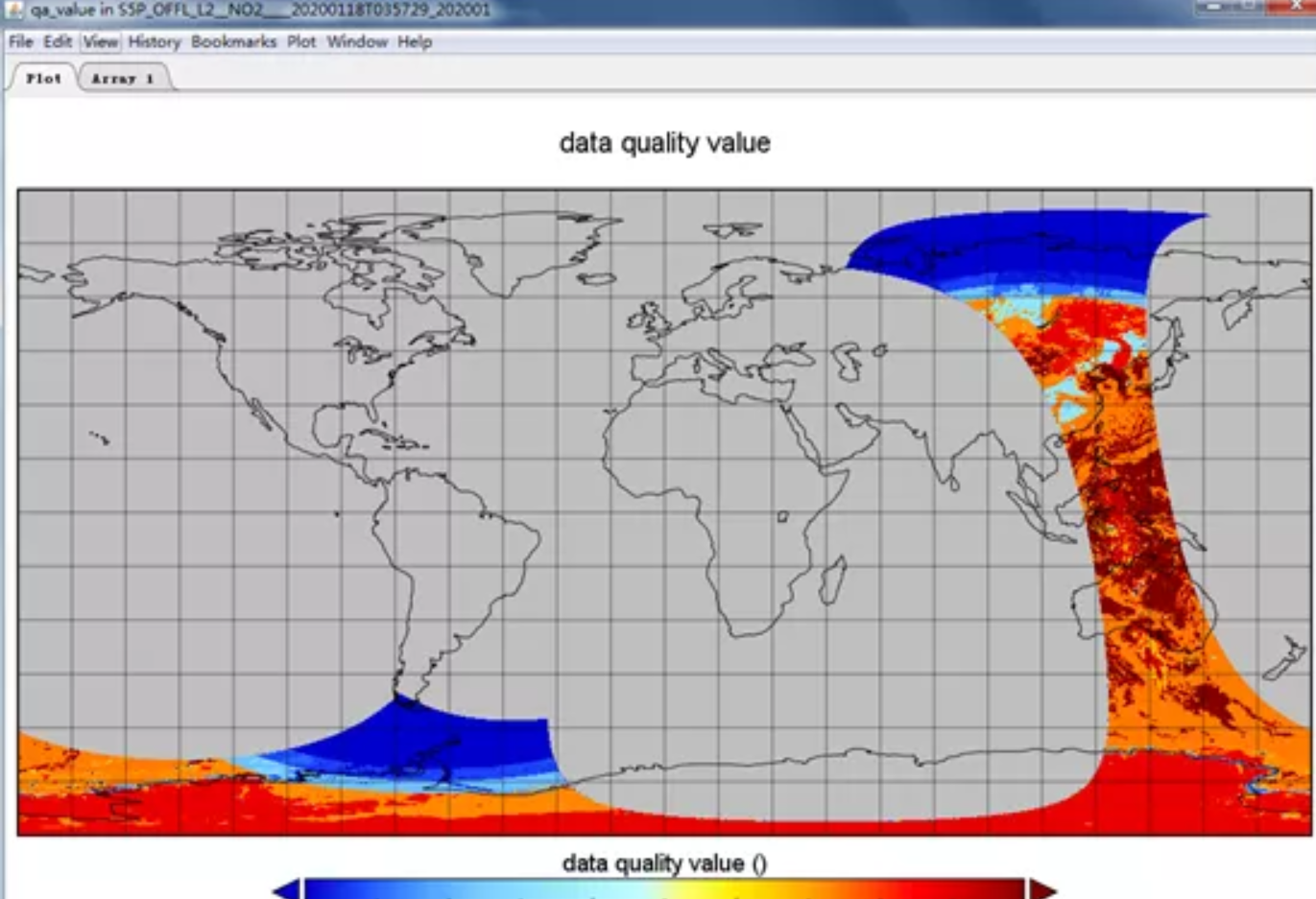 对qa_value进行可视化
对qa_value进行可视化
Panoply用于查看S5P数据非常方便,但是不能用来转换格式,无法将S5P数据输出到GIS软件中。
# S5PROCESSOR
为了把S5P的NC数据转为TIFF数据,我试了好多种方法,终于在GITHUB上面发现了一个R包:S5Processor
R包地址:https://github.com/MBalthasar/S5Processor
# S5PROCESSOR安装
很多同学反映不知道怎么安装S5processor这个包。
首先,这个包需要借助Rtools,下载一个Rtools,根据自己运行环境选择一个合适的版本,安上就好。
https://cran.r-project.org/bin/windows/Rtools/
 提示没有devtools,好说,直接安装一下这个包就好
提示没有devtools,好说,直接安装一下这个包就好
 安装devtools
安装devtools
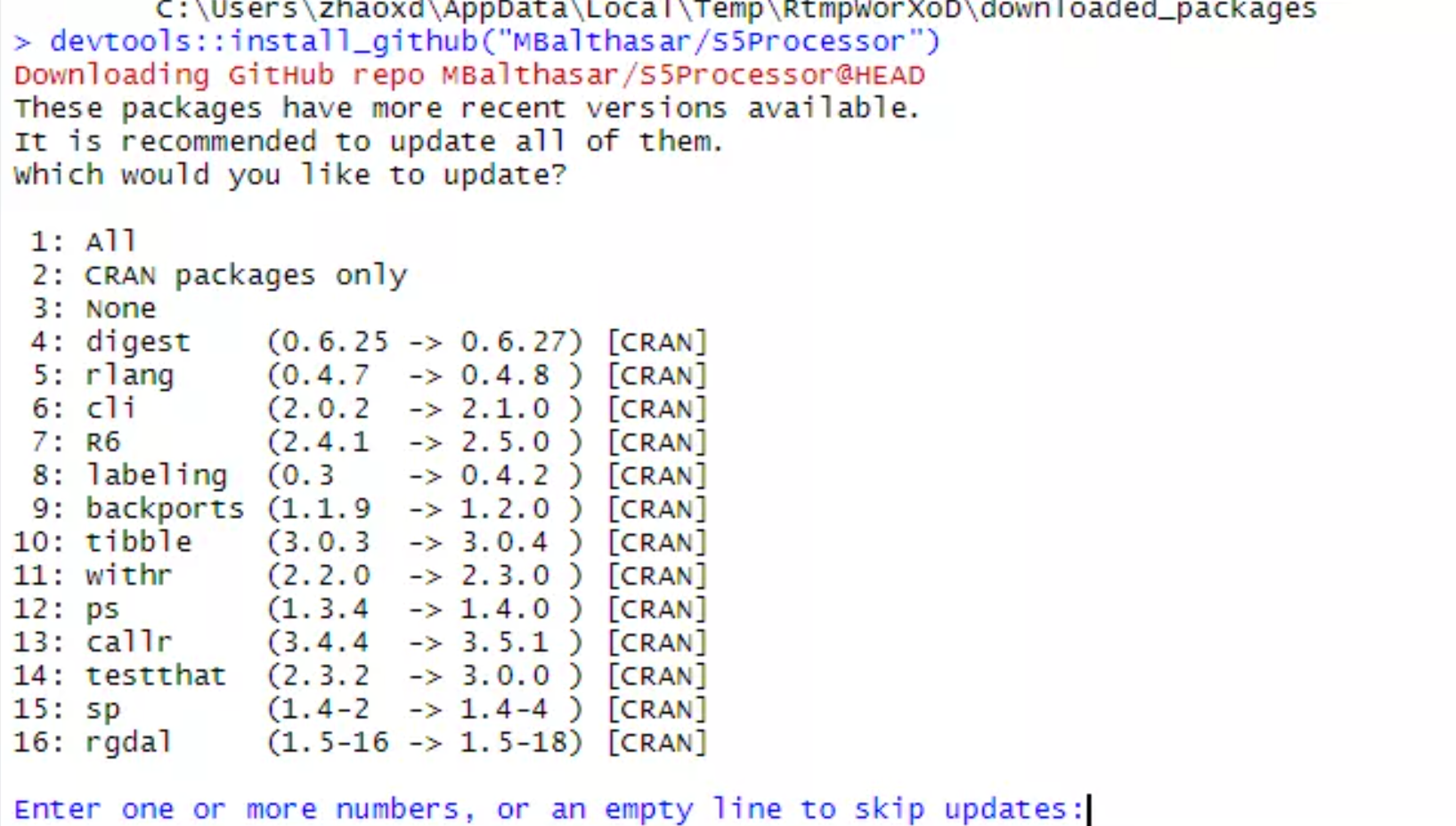 是否更新R包?可以更新,也可以跳过
是否更新R包?可以更新,也可以跳过
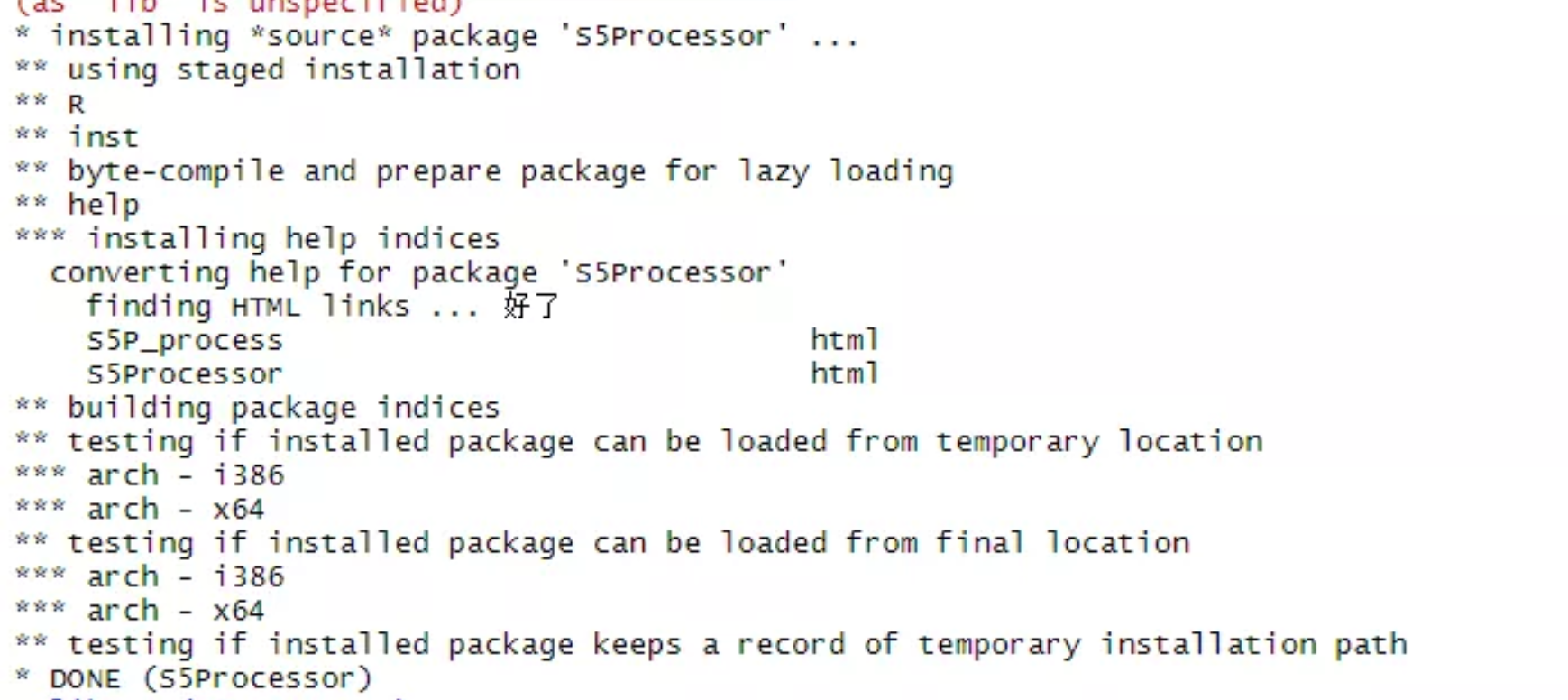 安装完成
安装完成
# S5PROCESSOR数据转换
我主要是想对S5P数据进行格式转换,转换为TIFF格式后便于在GIS中进行分析。代码实例如下:
devtools::install_github("MBalthasar/S5Processor")
library(S5Processor)
library(ncdf4)
library(ggplot2)
library(dismo)
library(maptools)
library(raster)
library(geosphere)
library(rgdal)
library(rgeos)
library(sp)
BeijingNO2 <- S5P_process(input = "S5P_OFFL_L2__NO2____20200118T035729_20200118T053859_11730_01_010302_20200121T230957.nc",
product = 39)
writeRaster(BeijingNO2, "BeijingNO2", format = 'GTiff', overwrite = TRUE)
关于NO2数据产品和单位的介绍见产品文档(参考物文献7)

转换后的数据就可以在ArcGIS中打开了,坐标系识别正常,NO2垂直柱密度单位。
# 哨兵六号
Sentinel-6的首颗卫星于2020年11月21日发射,主要用于全球海洋监测。此外该卫星还配备收集大气数据的传感器,用于改进天气预报和飓风追踪。

# 传感器
Sentinel-6 卫星携带三种传感器,分别是:
Poseidon-4:Ku/C 波段天底指向合成孔径雷达(SAR,仅限 Ku 波段)高度计;
AMR-C:用于气候的多频高级微波辐射计;
HRMR:用于增强沿海地区大气参数测量的实验性高分辨率微波辐射计
# 数据下载
虽然该卫星已经发射,但笔者未查询到相关数据的下载方式。
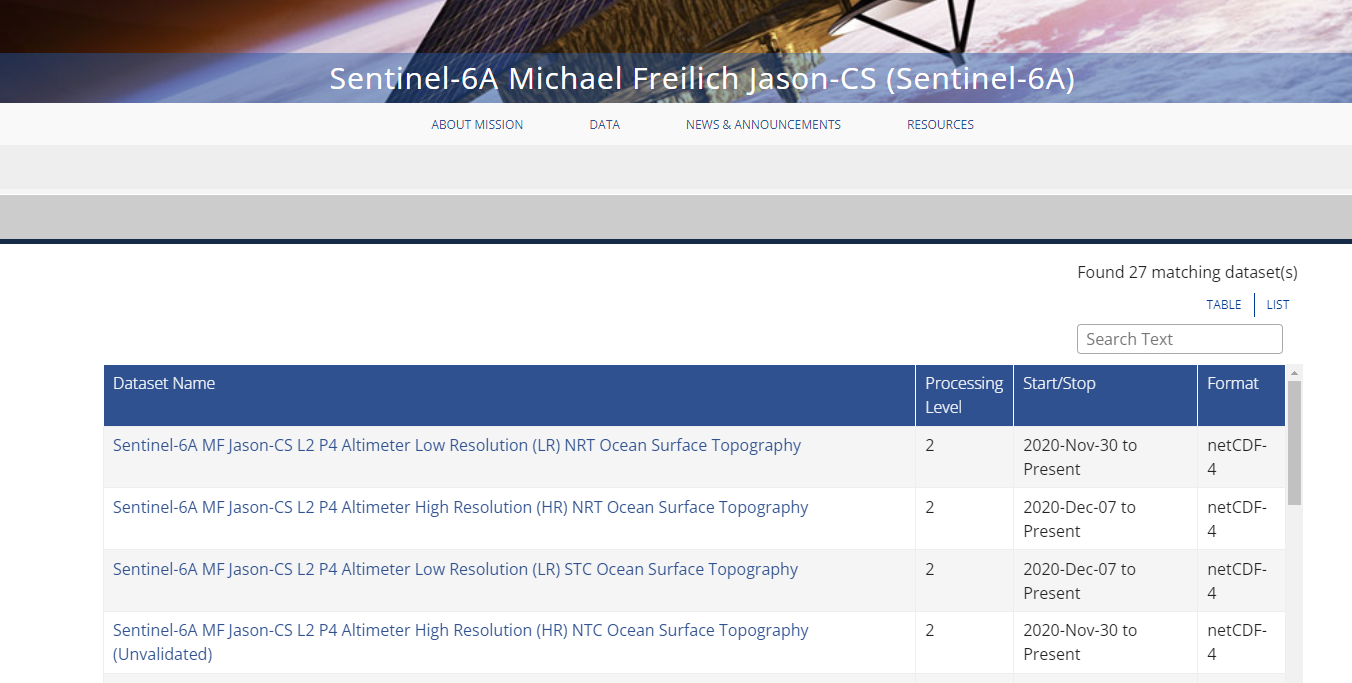
可以试试NASA公布的27景Sentinel-6 的样例数据,下载地址为:https://podaac.jpl.nasa.gov/Sentinel-6?sections=data。
# 哨兵七号-哨兵十二号
目前欧空局没有透露更多细节,后续卫星有进展,会在“地信遥感数据汇”网站(www.gisrsdata.com)上更新:

# 哨兵工具
针对哨兵系列数据的处理和使用,欧空局联合一系列机构开发了众多工具箱,具体为:
# SNAP
SNAP是适用于所有 Sentinel 工具箱的通用架构,是目前使用最广泛的Sentinel工具。
SNAP 非常适合地球观测处理和分析。
下载地址为:http://step.esa.int/main/download/snap-download/
# S1TBX
S1TBX是处理Sentinel-1 数据的工具箱,用于校准、散斑过滤、配准、正射校正、镶嵌、数据转换、偏振测量和干涉测量。
下载地址为:http://step.esa.int/main/download/
# Atmospheric Toolbox
Atmospheric Toolbox是用于摄取、处理和分析大气遥感数据的工具。该工具箱由CODA、HARP、VISAN和QDOAS四部分组成。
下载地址为:https://atmospherictoolbox.org/
# Broadview
ESA和CNES联合开发的高度测量开源工具Broadview。

该工具能够读取来自官方数据中心的所有测高数据(ERS -1 、ERS -12、Topex/Poseidon、Geosat Follow-on、Jason-1、Envisat、Jason-2、CryoSat和 Sentinel-3),并进行高度数据处理和可视化。
# PolSARpro
PolSARpro 用于开发极化 SAR 数据。

下载地址为:https://step.esa.int/main/toolboxes/polsarpro-v6-0-biomass-edition-toolbox/
# CFI
Earth Observation CFI 软件是用于计时、坐标转换、轨道传播、卫星指向计算和目标能见度计算的预编译 C 库集合。
下载地址为:https://eop-cfi.esa.int/index.php/mission-cfi-software/eocfi-software/branch-4-x
# ESOV NG
该工具是作为所有 ESA 卫星仪器条带可视化的工具,并帮助用户了解卫星测量的时间和地点。
https://earth.esa.int/eogateway/tools/esov-software-tools-esov-ng-
还存在很多其他官方和第三方的哨兵数据相关工具,这里不再做详细描述,感兴趣的可以去Google一下。
# 参考
https://scihub.copernicus.eu/
https://docs.sentinel-hub.com/
https://www.mdpi.com/2072-4292/11/17/1969/htm
https://en.wikipedia.org/wiki/Copernicus_Programme
https://sentinels.copernicus.eu/web/sentinel/missions/sentinel-1/instrument-payload
开源集思.https://mp.weixin.qq.com/s/XrFctLqditU12zHuaq5x8A
# 写在最后
1.Sentinel卫星数据产品非常丰富,从已经得到广泛认可的哨兵二号,到还在计划中的哨兵十二号,让我嗅到了欧空局的土豪气息。

2.文中列出的资料几乎全部来自于欧空局官网和维基百科,保证了信息的可靠性。

3.受限于笔者的知识水平和英语能力,教程未必完全准确。如果有疑问,建议在我列出的参考网址中寻找答案。尽量不要相信中文互联网上的资料,包括我这篇教程,因为翻译必定会引起信息的不准确性。